Byte dedicated the August 1982 issue to the Logo language. This issue is an excellent cross-platform snapshot of Logo and its applications.
LCSI Sprite Card
Next in my ongoing effort to document the world’s most expensive version of Logo for the Apple II, LCSI’s Sprite Logo for the Apple II Family, I show the included hardware sprite card.
The board is a custom design from LCSI based on the TI TMS9918A video display processor, a video chip used in several personal computers contemporary with the Apple II. Most of the board area consists of the standard TMS9918A chip and support circuits, including 16 KB of video memory (U1 – U8), the video clock, and the composite out.
A short pigtail brings the composite video connection to the outside of the computer case. The sprite card does not display normal Apple II video, and the user must switch the cable between the sprite card and normal video output when switching between software designed for the card and other software. There’s a separate ground lead from the composite connector to the power supply. I’ve never seen a similar separate ground lead on any other peripheral card. Perhaps LCSI had trouble passing the FCC tests and added this ground as the least expensive fix.
This card includes a 2 KB EPROM. A ROM (or EPROM) allows reliable software detection of the card. However, 2 KB is too large for this function alone. Since the 64 KB main memory of the Apple II is limiting for Logo, I expect the designers used the extra space for Logo-related code or data. I’ll examine the contents in a later post. There’s a second unpopulated (U14) ROM footprint. Perhaps LCSI considered using lower density EPROMs or more EPROM.
The decoupling capacitors (C1 – C10) are too large for the PCB footprints. Notice how the leads are bent at odd angles to make the available parts fit.
There are two unplated holes (one near C13 and another near U1) in the PCB. I have no idea why these exists. Perhaps they’re mounting holes used during manufacturing, or perhaps they’re harmless errors in the board design.
I look forward to seeing the card “in action.”
-

- Front of package
-

- Package label
-

- Back of package
-

- The sprite card with composite pigtail
-

- Component side
-

- Solder side
-

- Pigtail connection
-

- Composite jack with mounting hardware
Who is Seymour Papert?
This excellent TEDx Talk introduces Dr. Papert and his ideas. I recommend this if you’re interested in Logo or computers in education.
Unboxing “Sprite Logo”
Continuing my exploration of LCSI’s “Sprite Logo”, let’s break the shrink wrap and open the box. These photographs preserve the original packing order. Despite dirt and water damage to the exterior, the box contents appear pristine.
-

- “Read me first” and errata sheet

-

- Foam

-

- Sprite card

-

- Screws for grounding wire

-

- More foam

-

- Disk
-

- Packing list
-

- Keyboard stickers for II/II+

-

- Registration card
-

- “Introduction to Programming” manual
-

- “Introduction to Dynamic Turtle Graphics” manual
-

- “Reference Manual”
-

- Empty box

Boxing “Sprite Logo”
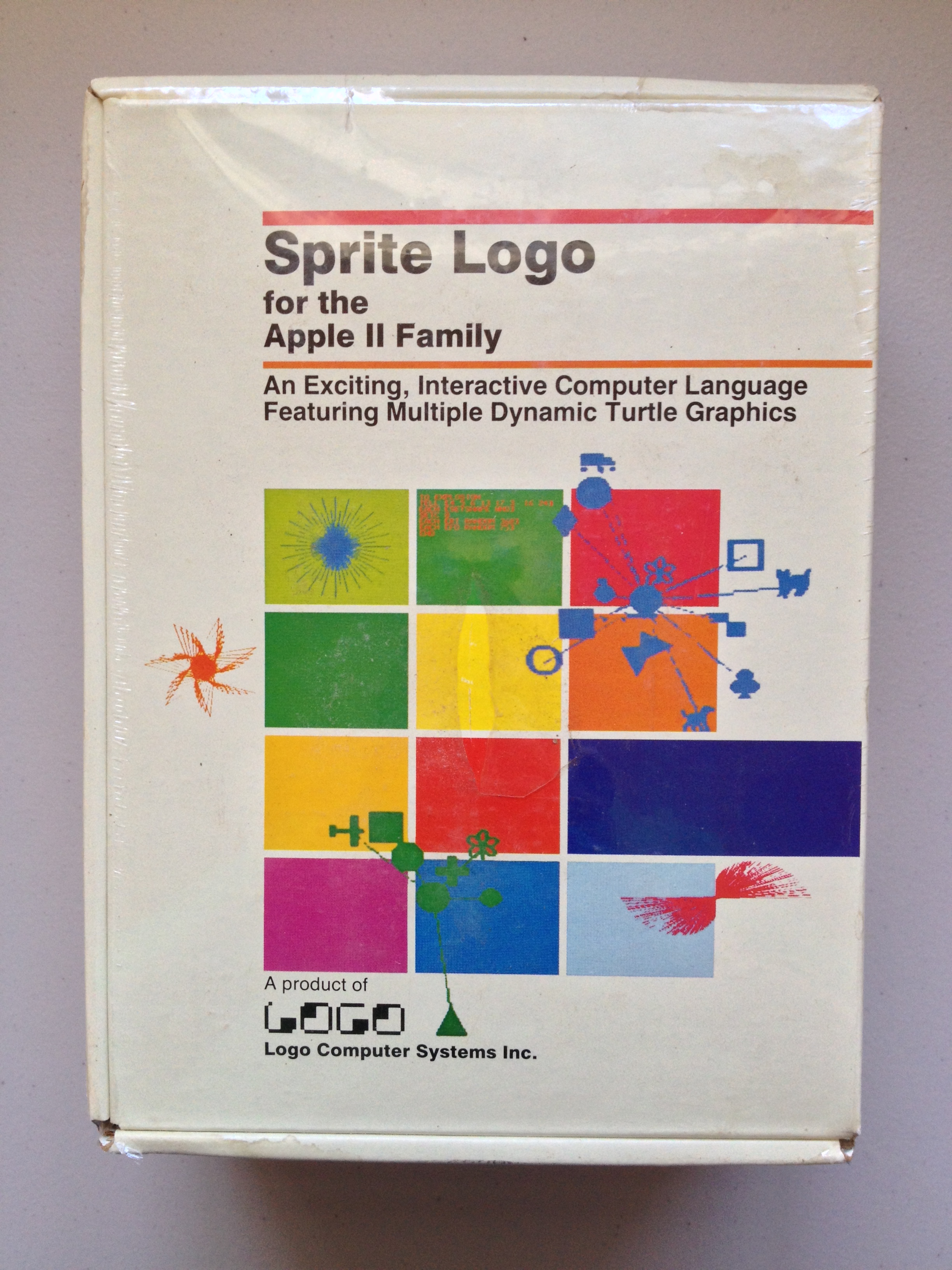
LCSI “Sprite Logo” comes in a large cardboard box with similar design to the “Apple Logo” box. Compared to “Apple Logo”, the “Sprite Logo” box is larger, more colorful, and displays patterns that suggest interconnections between multiple turtles. Notice the turtles taking on different shapes, such as an airplane, flower, dog, cat, or truck. The subtitle promises “An Exciting, Interactive, Computer Language Featuring Multiple Dynamic Turtle Graphics.”
-
- Front of the box
-

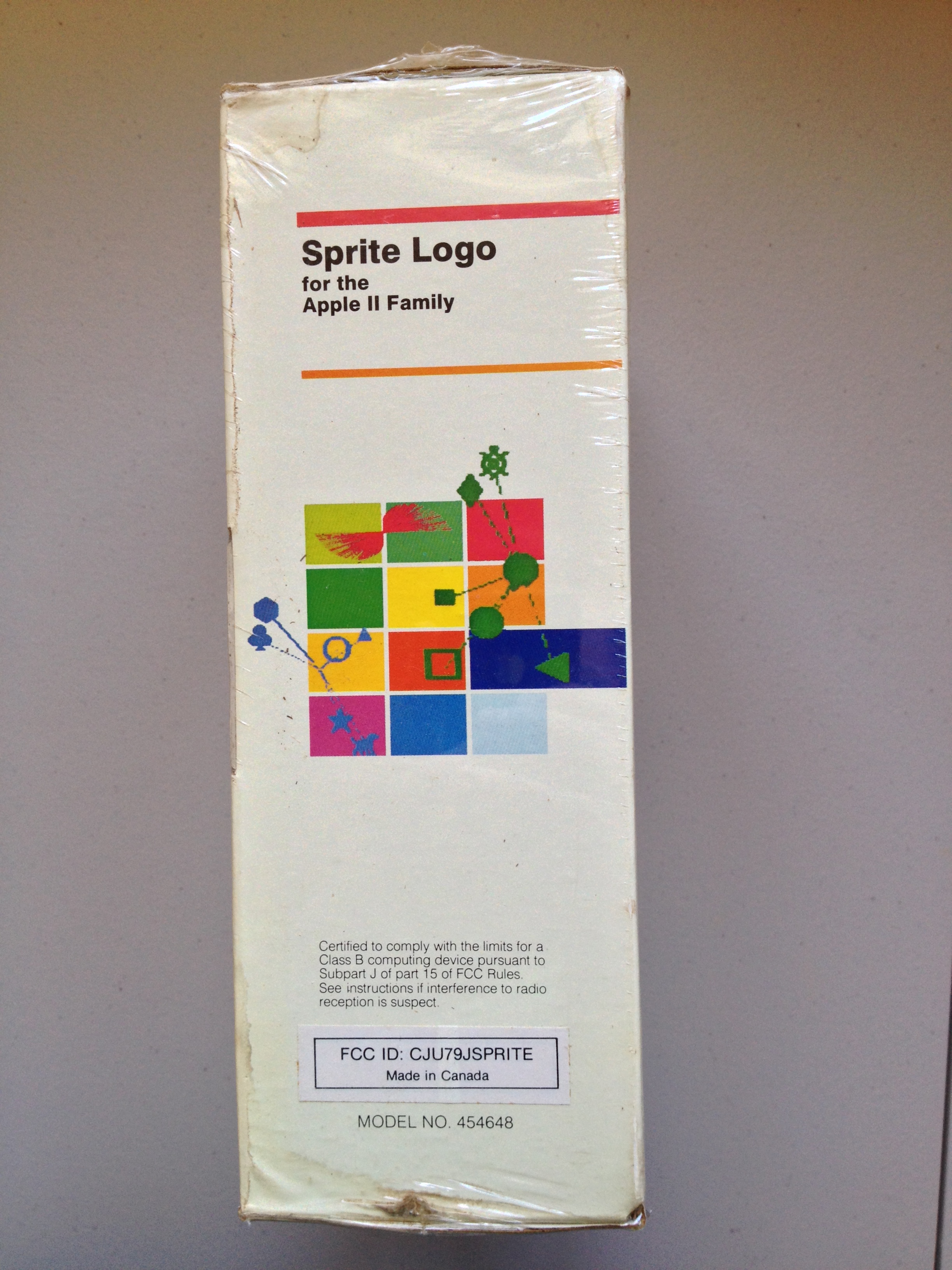
- Right side of the box
-

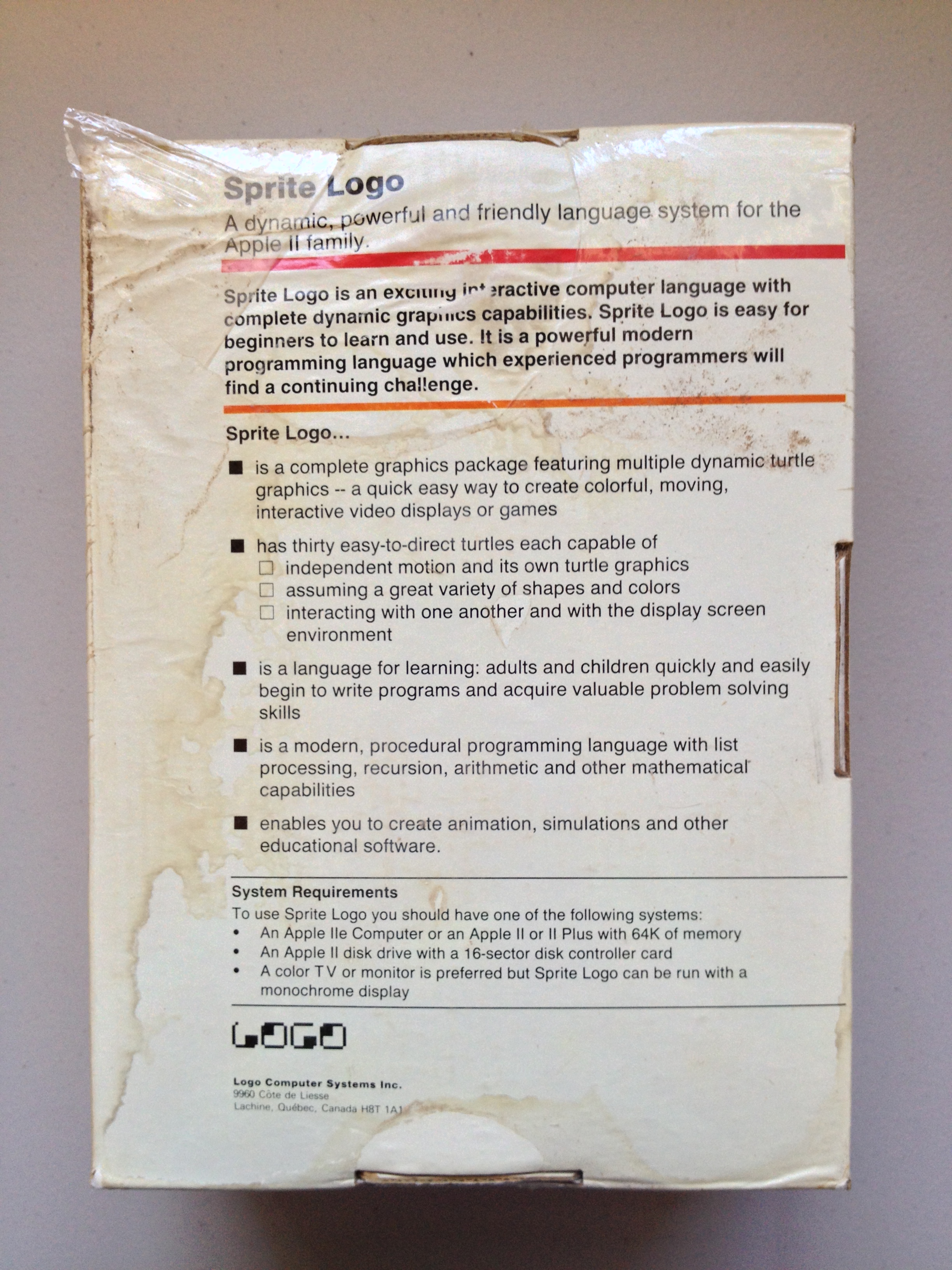
- Back of the box
-

- Left side of the box
-

- Top of the box
-

- Bottom of the box
On the front, the topmost green box contains a short, sprite-specific Logo program:
TO EXPLOSION
TELL [4 5 6 13 17 3 16 24]
EACH [SETSHAPE WHO]
SETC 8
EACH [RT RANDOM 360]
EACH [FD RANDOM 75]
END
The back of the box provides some details. The text does not compare Sprite Logo to Apple Logo but does emphasize words that set Sprite Logo apart like “interactive”, “dynamic” “colorful”, “moving”, and “animation”.
Sprite Logo
A dynamic, powerful and friendly language system for the Apple II family.Sprite Logo is an exciting interactive computer language with complete dynamic graphics capabilities. Sprite Logo is easy for beginners to learn and use. It is a powerful modern programming language which experienced programmers will find a continuing challenge.
Sprite Logo …
- is a complete graphics package featuring multiple dynamic turtle graphics — a quick easy way to create colorful, moving, interactive video displays or games
- has thirty easy-to-direct turtles each capable of
- independent motion and its own turtle graphics
- assuming a great variety of shapes and colors
- interacting with one another and with the display screen environment
- is a language for learning: adults and children quickly and easily begin to write programs and acquire valuable problem solving skills
- is a modern, procedural programming language with list processing, recursion, arithmetic and other mathematical capabilities
- enables you to create animation, simulations and other educational software
System Requirements
To use Sprite Logo you should have one of the following systems:
- An Apple IIe Computer or an Apple II or II Plus with 64K of memory
- An Apple II disk drive with a 16-sector disk controller card
- A color TV or monitor is preferred but Sprite Logo can be run with a monochrome display
Curiously, the box does not mention an enclosed hardware card, and the only sign that the box contains hardware is the FCC ID (CJU79JSPRITE) on the left side. The ID is on a sticker, suggesting that the boxes were printed prior to receiving the ID. The FCC database shows that LCSI received approval on 2/16/1984. The bottom of the box has a stamped number, 2575, that is likely the serial number for the contained hardware card.
Next, I’ll open the shrink-wrapped box …
Overview of Logo for the Apple II in 1984
In the 1980s, there was a lot of enthusiasm and press surrounding the Logo programming language. Logo and the underlying pedagogy promised a revolution in education using the new personal computer. Unsurprisingly, there were versions of Logo for most personal computers of the era, and, in many cases, multiple versions of Logo for each computer. According to “Antic” (March 1984, pages 28 – 31) LCSI, one of the world’s leading Logo vendors, had 15 contracts to develop Logo in mid-1983.
Source: Antic, March 1984, p 31
“Creative Computing” (December 1984, pages 94 – 106) provides a summary of the various Logo versions available in 1984. A summary of the Apple II versions based on this article follows. Note that there were additional versions of Logo introduced later, most notably The Byte Works 3D Logo and LCSI Logo Writer. Please see my KansasFest 2011 presentation for photographs and discussion.
“Sprite Logo” stands out in this list due to the price. It’s 3 times more expensive ($299 vs. $100 MSRP) than any other version. Over the next few weeks, I’ll explore Sprite Logo, why it’s so expensive, and what’s unique.
| Name | MSRP (USD) in Dec. 1984 | Notes |
|---|---|---|
| Apple Logo (from LCSI) | $100 | DOS 3.3 based. Apple adopted and distributed LCSI Logo. Includes excellent documentation, including “Introduction to Programming through Turtle Graphics” by Cynthia Solomon. |
| Apple Logo II (from LCSI) | $100 | This is an updated, ProDOS based, 128KB version of the original Apple Logo. |
| Apple Sprite Logo (from LCSI) | $299 | A variation of Apple Logo with a “sprite board” enabling “multiple dynamic turtle graphics.” This version was unpopular due to the price. |
| Terrapin Logo | $99 ($65 retail) | Based on MIT Logo. Terrapin offered multiple upgraded versions throughout the life of the product and a nice manual. Version 3.0 added 128KB support in 1985. See page 92 of “Creative Computing” (December 1984) for the retail price. |
| Krell Logo | $99 ($73.95 retail) | Based on MIT Logo. Included a poster, introductory “Alice in LogoLand” disk, and minimal documentation. Krell Logo did not receive updates during its lifespan. See page 95 of “Creative Computing” (December 1984) for the retail price. Note that page 95 contradicts page 106 and states the MSRP as $89.95. |
Mold Making and Casting
I joined the Mold Making class with the Central Oregon Makers last week. Before going, I had no idea how to make a mold or what I might use it for. Although 3D printing (“additive manufacturing”) gets most of the attention, mold making and casting seem like useful and versatile tools for duplicating and fabricating items. I could see using this technique to repair or replace small latches, wheels, key caps, housings, and decorative features where an original is available. For example, I’ve had trouble finding robot wheels I like, but now I can make my own.
It’s nice to have another tool in my toolbox, and I expect to invent problems just to use this tool.
Play-i
Play-i is an interesting start-up using robotics to teach programming concepts to children as young as 5 years old. From the company’s marketing material, here’s the vision:
“In starting Play-i, we set out to create the product we want our children to have. Our mission to make computer programming accessible for every child is bigger than we are.
We need to re-think education. Students are becoming great at retaining facts, but there’s not enough focus on teaching them how to think. We are preparing our children… and your children for the future by inspiring curiosity and igniting a love for learning.”
Details on their system are a bit scarce, but I find their effort fascinating because:
- Play-i is designed for young children. Most commercial robots, even those advertised for education, are unsuitable for younger children. The robots require assembly, are relatively fragile, and have exposed electronics. Of course, older or more experienced folks might prefer these things, but the system seems to have sufficient capabilities for both beginner and more advanced learning.
- Programming is hands-on and eye-level. Many other robots require a desktop computer, cables, and software installation. In contrast, Play-i promises programming with a tablet while sitting on the floor next to the robot. Hopefully, this system will provide immediate feedback, gratification, and interaction. The robot will support several programming languages, which should allow the robot to grow and teach a wide variety of skills and ages. I think the success of the robot will depend on the supporting software, programming interfaces, and curriculum.
- The robots have “personalities” and names. The stories, colors, and shapes associated the robots seem to build an emotional relationship between humans and their robot pets, and I suspect that children will find this anthropomorphism appealing.
I do have some concerns but none ought to block their goals. Specifically, the hardware is closed and lacks a supported way to “hack the hardware.” There is an interface for add-ons, but the add-ons appear to be cosmetic or mechanical like an arm, handle, or cape. I think the closed hardware design is necessary for young children but might limit some types of exploration.
Play-i does promise a developer API, which will likely be key to building a rich, capable software infrastructure and curriculum around the physical robot. The robot appears to offer quite a bit of capability and flexibility with multiple programming interfaces, options for customization, a decent set of sensors, and a decent set of actuators.
At the moment, Play-i is raising funds with pre-orders for a production run in Summer 2014. I look forward to seeing their “delightful robots” on my floor.
Living Computer Museum
The Living Computer Museum opened October 2012 in Seattle, WA. Unlike most museums that strive to preserve artifacts how they find them, usually broken and powered off, this museum keeps their machines alive. They’re in working condition, complete with the strangely beautiful sounds of teletypes, Disk ][ drives, paper tape, and raised-floor cooling. The museum is the vision of Paul Allen, co-founder of Microsoft. Allen cut his teeth on PDP minicomputers, and the museum’s collection reflects this but has a growing display of personal computers. I know little about the PDP series and vintage of machine, but I found the museum irresistibly fascinating and essential for everybody interested in computers.
I visited the museum last year shortly after its opening, and you may read my full report in Juiced.GS (Volume 17, Issue 4). And, yes, I should’ve posted this a year ago, but I somehow left the post as a draft … in my defense, it’s only a single-bit memory error.
KansasFest 2013
KansasFest came and went in a flurry of sleepless excitement. Among other things, we had a great keynote from Randy Wigginton, a surprise visit from Mr. Wozniak, and an Apple I. I particularly enjoyed seeing the amazing, creative, and unbelievable things people are doing with their Apple IIs.